伺服电机原理和普通电机区别 伺服电机工作原理
伺服电机与普通电机最大的区别在于它们的控制方式和精度。伺服电机能通过反馈系统精确地控制电机的转动,以达到高精度的位置控制和速度控制。而普通电机通常是通过控制电机的输入电压或电流来控制其转动,其精度和响应速度相对较低。
伺服电机的工作原理基于闭环控制系统。在伺服电机中,有一个位置传感器用来检测电机的转动位置,并将这个位置信息反馈给控制器。控制器接收到反馈后,会根据设定的目标位置和实际位置的差异,计算出电机应转动的角度或距离,然后输出相应的控制信号来驱动电机转动。通过这种闭环控制方式,伺服电机能够快速地响应控制信号,并精确地跟踪目标位置。
相比之下,普通电机通常采用开环控制系统。在开环控制系统中,电机直接接收到控制信号,并按照信号转动一定的角度或距离。由于没有位置反馈环节,普通电机无法精确地跟踪目标位置,其精度和响应速度相对较低。
此外,伺服电机通常具有更高的过载能力,能够在较大的负载变化下保持稳定的运行性能。而普通电机在过载情况下,容易发生烧毁或损坏。
总的来说,伺服电机和普通电机在原理和控制方式上有很大的区别。伺服电机通过闭环控制系统和位置反馈机制,能够实现高精度的位置控制和速度控制,而普通电机则主要依靠开环控制系统进行简单的转动控制。
伺服电机原理和普通电机区别 扩展
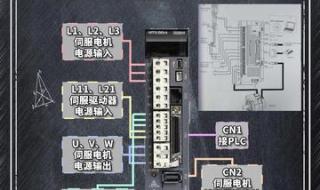
有区别,区别在于,伺服电机是一种能够自动控制位置、速度和加速度的电机。它通常由电机、编码器、控制器和驱动器等组成。伺服电机的工作原理是通过接收控制信号来精确控制电机的位置和运动。当控制信号发生变化时,驱动器会相应地调整电机的转速和/或位置,以实现精确的运动控制。
与普通电机相比,伺服电机具有以下区别:
1. 控制精度:伺服电机通过反馈信号实时调整电机的位置和速度,因此具有更高的控制精度。普通电机通常只能通过改变电压和频率来调节电机的速度,无法进行精确的位置控制。
2. 响应速度:伺服电机能够快速响应控制信号的变化,可实现更快的加速和减速效果。普通电机的响应速度相对较慢。
3. 动态性能:伺服电机能够实现高速、高加速度和高精度的运动控制,适用于需要快速、精确运动的应用。普通电机通常用于简单的机械运动。
总之,伺服电机通过闭环反馈实现精确的位置和速度控制,具有更高的控制精度、快速的响应速度和高动态性能,适用于对精度要求较高的应用。而普通电机则适用于一般的机械运动和简单的控制需求。
伺服电机原理和普通电机区别 扩展
伺服电机和普通电机在原理和结构上有一些不同之处。
首先,伺服电机通常具有较大的转子电阻,这使得其在工作时的转差率较高,有利于实现更好的控制精度和响应速度。
此外,伺服电机通常需要配合伺服控制系统使用,通过控制系统对电机的转速、方向和位置等进行精确的调节。
相比之下,普通电机通常是通过直接施加电压或电流来驱动其旋转,没有控制系统对电机进行调节。
因此,伺服电机具有更高的控制精度和响应速度,能够更好地适应各种复杂的工作环境和控制要求。
同时,伺服电机也具有更高的可靠性和稳定性,能够保证长期稳定的工作状态。
须知
吴酉号所有的摄影作品、视频教程、文章内容及教程截图均属于本站原创,版权为本站所有。
吴酉号旨在督促自己学习总结经验,分享知识,提供的软件、插件等相关资源仅供学习交流之用。
吴酉号分享的部分内容来源于网络,旨在分享交流学习,版权为原作者所有。
吴酉号提供的资源仅供日常使用和研究,不得用于任何商业用途。如发现本站软件素材侵犯了您的权益,请附上版权证明联系站长删除,谢谢!
根据二oo二年一月一日《计算机软件保护条例》规定:为了学习和研究软件内含的设计思想和原理,通过安装、显示、传输或者存储软件等方式使用软件的,可不经软件著作权人许可,无需向其支付报酬!鉴此,也望大家转载请注明来源! 下载本站资源或软件试用后请24小时内删除,因下载本站资源或软件造成的损失,由使用者本人承担!
本网站尊重并保护知识产权,根据《信息网络传播权保护条例》,如果我们转载的作品侵犯了您的权利,请邮件通知我们,我们会及时删除。
转载请注明出处>>伺服电机原理和普通电机区别 伺服电机工作原理